Созданию нового токоприемника для высокоскоростного электропоезда предшествовала большая научно-исследовательская работа по обоснованию технических требований и разработке основных конструктивных параметров.
В результате исследований, выполненных во ВНИИЖТе, было установлено, что для обеспечения удовлетворительного токосъема при скорости 200 км/ч приведенная масса 1 нового токоприемника должна быть меньше, чем у моторного вагона пригородного электропоезда с конструкционной скоростью 130 км/ч. Это требование вытекает из того, что при высоких скоростях движения в квадратичной зависимости возрастают как аэродинамическая подъемная сила токоприемника, так и динамическая (инерционная) составляющая нажатия токоприемника на контактную подвеску. Динамическая составляющая зависит от ускорения, получаемого приведенной массой токоприемника в вертикальном направлении, и, в конечном счете, она пропорциональна квадрату скорости движения электропоезда.
Динамическая составляющая контактного нажатия должна быть как можно меньшей не только для уменьшения отжатий контактного провода и износа при высоких скоростях, но и для того, чтобы увеличить скорость движения, при которой могут начаться отрывы полоза от контактного провода из-за изменения знака вертикального ускорения под влиянием внешних воздействий. Учитывая нежелательность большого отжатия контактного провода при суммарном действии аэродинамической подъемной силы и вертикального ускорения, приходится уменьшать приведенную массу токоприемника. Это сочетается также со снижением вертикальных перемещений полоза токоприемника в пролетах контактной подвески благодаря повышению постоянства эластичности контактной сети для высокоскоростной железной дороги. На участках, оборудованных полукомпенсированной подвеской постоянного тока, где предусматривается движение электропоездов со скоростями до 200 км/ч, применение токоприемников со средней приведенной массой свыше 26 кг недопустимо. Для участков с компенсированными подвесками приведенная масса токоприемника высокоскоростного электропоезда не должна превышать 35 кт. Это относится к условиям одновременной работы нескольких токоприемников электропоезда.
С учетом названных требований была создана конструкция нового авторегулируемого токоприемника пантографного типа с двумя подвижными системами верхней 2 и нижней 3 (рис. 37). Принципиально новый токоприемник ТСп-1М отличается от обычного тем, что на небольшое изменение высоты контактного провода в пролетах контактной подвески реагирует не вся масса подвижных частей токоприемника, а только его верхняя подвижная система. На существенные изменения высоты контактного провода, например, под искусственными сооружениями, реагируют обе подвижные системы, причем верхняя управляет работой нижней системы посредством пневматической связи. Эту связь осуществляет механизм управления золотником 15. Нахождение поршня в средней зоне золотника обеспечивает перекрытие воздухопровода, и при перемещении полоза по вертикали в пределах ±300 мм относительно его средней высоты нижняя система остается неподвижной.
При первоначальном подъеме токоприемника, когда рамы верхней системы поднимаются на большую высоту, поршень золотника, перемещаясь вправо, открывает доступ сжатому воздуху в пневматический цилиндр нижней системы, в результате чего подвижное основание начинает подниматься. Поршень золотника при подъеме основания перемещается влево и, достигнув среднего положения, перекрывает канал воздухопровода. Подъем нижней системы прекращается. При отжатии полоза вниз и опускании верхней подвижной системы больше, чем на 300 мм относительно средней высоты золотник обеспечивает связь пневматического цилиндра с атмосферой и подвижное основание начинает опускаться. Это продолжается до тех пор, пока поршень золотника, перемещаясь теперь вправо, не перекроет канал воздухопровода.
Благодаря использованию принципа авторегулирования при движении электропоезда с высокой скоростью перемещается только верхняя подвижная система и приведенная масса токоприемника определяется массами полоза и верхней системы.
Так как размеры верхней подвижной системы двухступенчатого авторегулируемого токоприемника ТСп-1М примерно в 2 раза меньше стандартных токоприемников П1 пригородных электропоездов, то и приведенная масса верхней системы также примерно в 2 раза меньше. Приведенная масса верхней подвижной системы равна 9,5 кг. Рамный полоз токоприемника имеет значительную ширину (440 мм) для предотвращения его вывертывания при высокой скорости движения. Несмотря на это, малые длины стержней подвижных рам верхней системы определили малую аэродинамическую подъемную силу рам, вызываемую воздействием встречного воздушного потока.
Токоприемник ТСп-1М имеет устройство аварийного опускания при его ударе о какое-либо препятствие на неисправной контактной сети при движении электропоезда. Это устройство включает в себя штифт, соединяющий две части телескопической синхронизирующей тяги. При ударе штифт разрушается, тяга складывается и не препятствует повороту главного вала, сопровождающемуся переходом поршня золотника в левое положение. В результате этого сжатый воздух из пневматического цилиндра выходит в атмосферу и нижняя подвижная система под действием опускающей пружины и силы тяжести подвижных частей складывается.
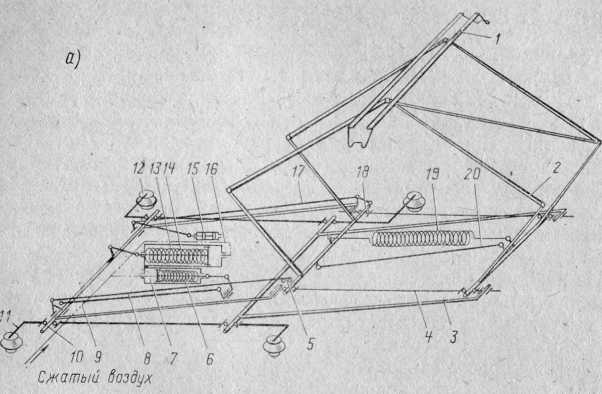
Рис. 37. Схема (а) токоприемника:
1 — полоз; 2 — подвижные рамы верхней системы; 3 — подвижные рамы нижней системы; 4 — подвижное основание; 5 —серьга; 6 — опускающая пружина верхней системы; 7 — пневмоцилиндр верхней системы; 8 — тяги для опускания подвижных рам верхней системы; 9 — воздухопровод от магистрали; 10 — главный вал нижней системы; 11 — подвижное основание; 12 — изолятор; 13 — пневмоцилиндр нижней системы; 14 — опускающая пружина нижней системы; 15 — золотник; 16 — воздухопровод к пневмоцилиндру нижней системы; 17 — тяга механизма управления золотником; 18 — главный вал верхней системы; 19 — подъемная пружина верхней системы; 20 — синхронизирующая тяга
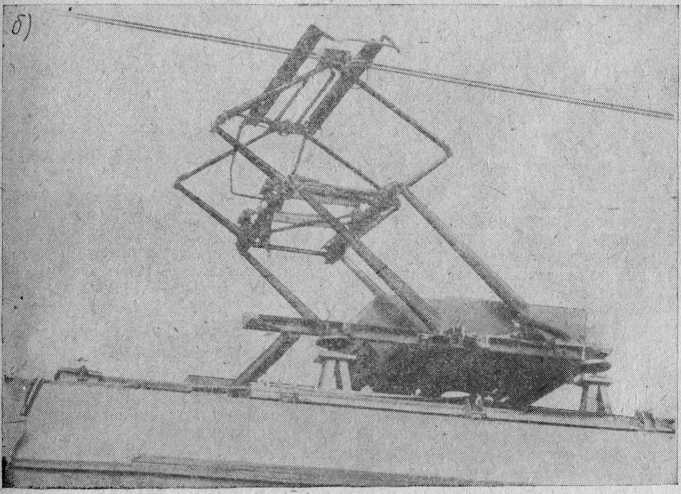
Рис. 37. Общий вид (6) токоприемника:
На неподвижном основании токоприемника поставлены гидравлические демпферы для исключения резонансных колебаний нижней подвижной системы при определенном характере вертикальных колебаний кузова вагона.
Впервые примененный на электропоезде ЭР200 токоприемник ТСп-1М удовлетворяет требованиям ГОСТ 12058—72 и обеспечивает требуемый токосъем при скоростях движения до 200 км/ч как на участках с компенсированной, так и с полукомпенсированной одинарной рессорной цепной подвеской с двумя контактными проводами.
Авторегулируемый токоприемник ТСп-1М имеет следующие основные технические данные:
Установочные размеры............................................... 1980x1450 мм Высота без изоляторов (в нерабочем положении)...................... 410 мм Максимальная высота подъема........................................ 2104 Рабочая высота подъема: наименьшая......................................................... 100 наибольшая......................................................... 2000 Ширина полоза...................................................... 440 Полная длина полоза................................................ 2130 Длина горизонтальной (контактной) части полоза..................... 1270 Масса полоза....................................................... 13,9 Приведенная масса токоприемника.................................... 24,5 Статическое нажатие в диапазоне рабочей высоты: активное (при подъеме)............................................. не менее 80 пассивное (при опускании).......................................... не более 115 Опускающая сила в диапазоне рабочей высоты......................... не менее 210 Допустимый продолжительный ток при движении........................ 1650 А Номинальное давление сжатого воздуха для подъема токоприемника..... 0,5 Минимальное давление сжатого воздуха для подъема токоприемника..... 0,375 Время подъема до максимальной высоты............................... 7—12 с Время опускания с максимальной высоты.............................. 7—10 с
Полоз токоприемника заправляют сухой графитовой смазкой марки СГС-0.
В процессе опытной эксплуатации токоприемника ТСп-1М было выполнено усовершенствование отдельных его узлов. Это учтено при разработке модернизированного токоприемника Сп-6М. Последний отличается габаритами в нерабочем положении (без изоляторов); 2594x2260x400 мм вместо 2754x2260x410 мм. У токоприемника Сп-6М перекрытие воздухопровода поршнем золотника обеспечивается при перемещении полоза по вертикали в пределах ±250 мм относительно его средней высоты над подвижным основанием (вместо ±300 мм у токоприемника ТСп-1М).
У токоприемника Сп-6М гидравлические демпферы поставлены не только на главных валах нижней системы рам, но и на валах верхней системы рам.